Optimum Goto Driver
This is the thread's initial revision.
Goto code is crucial for goto surfing and melee movement, however the code listed in this page is not optimal, there are cases that all these methods give wired behavior.
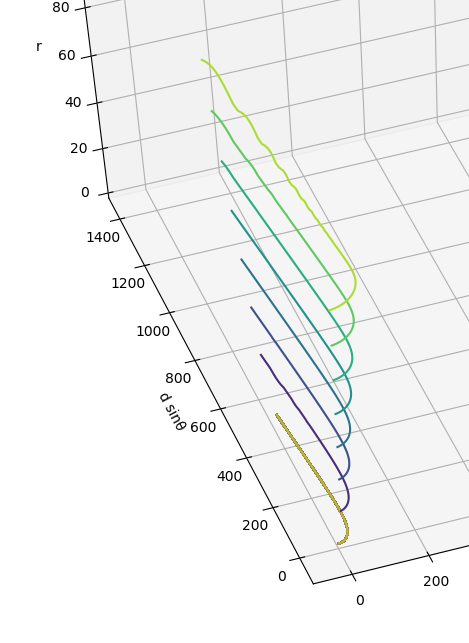
I did some numerical analysis on some simplified model of goto driver, and the result indicates some boundary with shape like r = tan(b θ), -π/2 < θ < π/2, 0 < b < 1, where all destinations within this area is best turning with full speed & going with full speed afterwards, and all destination outside this area is best going with full speed from start & turning at the same time. Destinations near the boundary (the margin is narrow, though) is best turning with max speed at first while accelerating at the same time (and reducing turning rate as a result, per robocode physics), being an intermediate of the both extreme.