Description of BART Abstract:
Due to the advent of ray tracing at interactive speeds and
because there is an absence of a way to measure and
compare performance and quality of ray traced scenes that are animated,
we present an organized way to do this fairly and
accurately in this proposal for BART: A Benchmark for Animated Ray
Tracing.
This is a suite of test scenes, placed in the public domain,
designed to stress ray tracing
algorithms, where both the camera and objects are animated
parametrically.
Equally important, BART is also a set of rules on how to measure
performance
of the rendering. We also propose how to measure and compare the error in the
rendered images when some kind of approximation algorithm has been used.
Informal description:
We were and still are interested in efficient algorithms
for computer graphics. In this case we focused on ray
tracing algorithms for animated scenes. The main reason for
this is that real-time or interactive ray tracing is
quite possible to do on multiprocessor computers.
So, to be able to compare different acceleration
schemes, we set out to compile a suite of test scenes
for this. We currently have three scenes described below
that we have put into the public domain. Each scene
was designed to stress ray tracing algorithms in general.
In order for the user of BART to make a fast implementation, we
provide a simple C-parser for the file format (it
takes about half a day to implement), and some
animation code.
The benchmark may also be used to:
1) compare algorithms using polygon rendering hardware (e.g., OpenGL),
2) compare global illumination and radiosity algorithms,
3) compare motion blur algorithms,
but was not designed specifically for these areas of interest.
Test scene: Kitchen Short description:
The Kitchen scene was designed to stress:
1)
the teapot in the stadium problem (which is done by having a small car
driving around in room; there are also very small, detailed objects
such as door knobs,
2) cache performance (this is done by having a scene
which is on the order of a magnitude larger than current L2 caches),
3) different hierarchies (this is implemented by having
and hierarchically animated (using translations,
rotations, and scalings) car in the scene), and
4) approximation algorithms (this is implemented by having
a sequence with high frame-to-frame coherency followed by
very little frame-to-frame coherency).
Depending on the acceleration data structure used and how
these are applied to the objects in the scene, there is also the
possibility of bounding volume overlap, when the car moves
under the table and around the chairs.
The scene contains more than 110,000 polygons and more than
7 MB of textures.
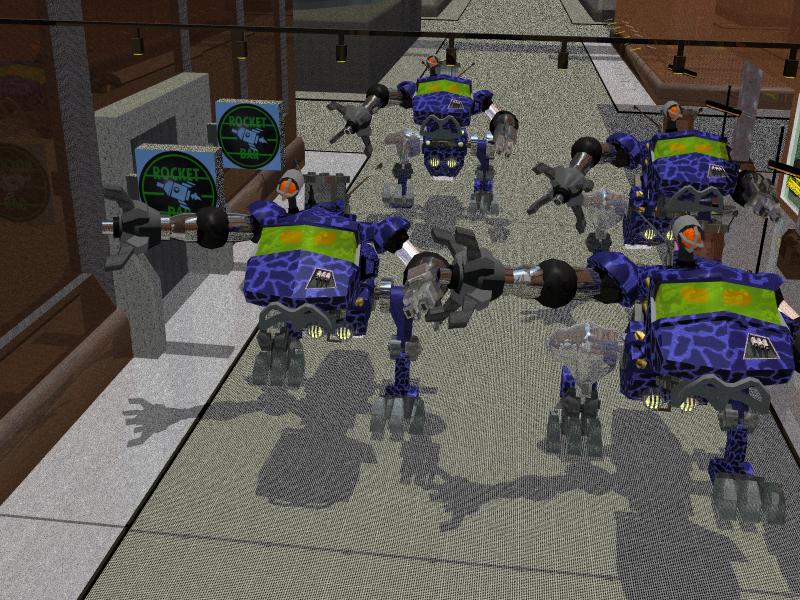
Test scene: Robots Short description:
The Robot scene was designed to include the following stresses: 1)
hierarchical animation, by the 18 moving parts of each warrior robot and
the corresponding hierarchical keyframe animated transforms, 2) change of
distribution; the distribution of objects goes from fairly balanced at
start to highly unbalanced in the end of the animation, where all robots
are clustered at the center of the scene, and 3) data structure overlap;
bounding volumes for parts in the arms and legs will overlap at the joints.
The scene also contains the
the teapot in the stadium-problem since the 10
robots each contain a lot of small details and are surrounded by large
low-detailed skyscrapes.
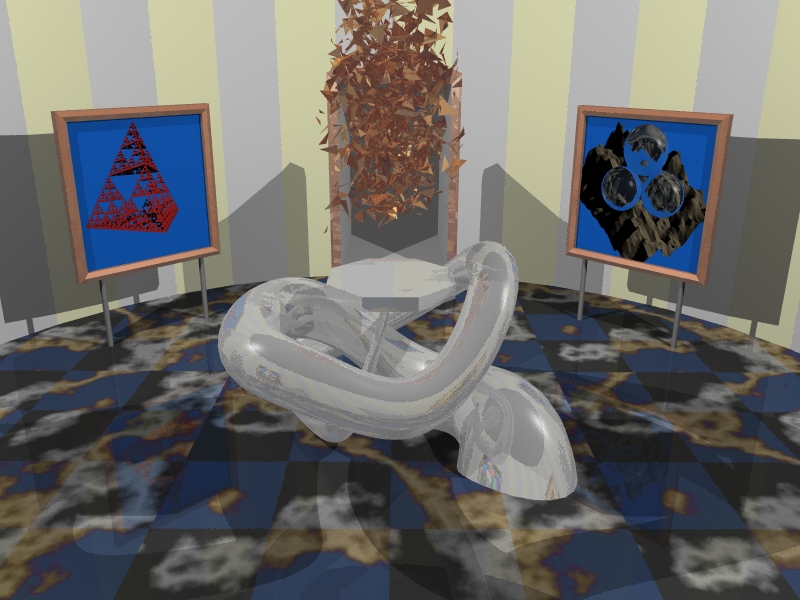
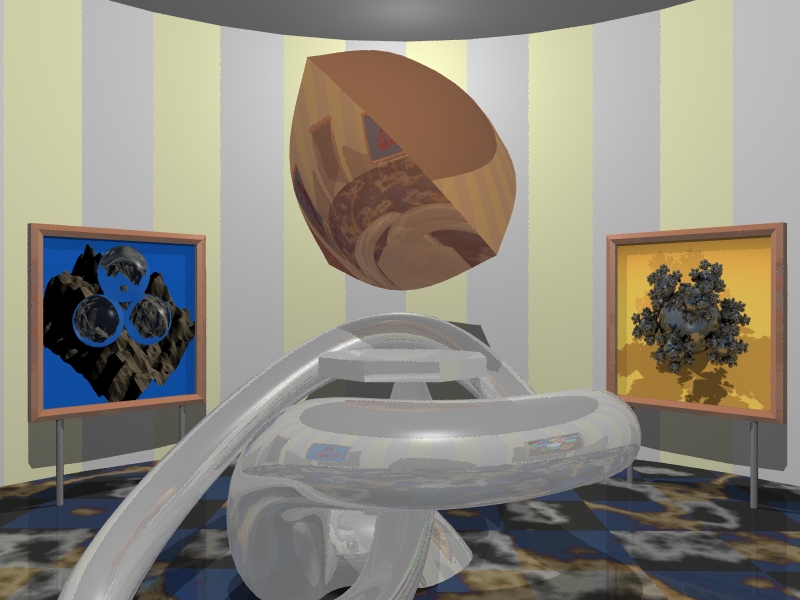
Test scene: Museum Short description:
The Museum scene was designed to stress the building of the
efficiency data structures for ray tracing. The scene is
a simple room in a museum with an animated abstract piece
of art in the middle of the room. This object consists
of a number (from 64 to 65,536 depending on the complexity
level) of triangle patches (triangles with normals at
each vertex). Each triangle patch has description
of its vertices and normals at five different times. For
a certain time t, the two triangle patches closest to
t are used to create a new triangle patch by interpolation.
Since each triangle patch is moving independently of each other,
this forces every known (to us) acceleration scheme
to rebuild its data structure for that object every frame.
Technical Report 00-14
lowres PDF (0.4 MB) or
hires PDF (7.7 MB).
A trimmed version has appeared as:
Jonas Lext, Ulf Assarsson, and Tomas Akenine-Möller,
``A Benchmark for Animated Ray Tracing'',
IEEE Computer Graphics and Applications, pp. 22-31, March/April 2001.
Original test scenes and source code (tar:ed and
gzip:ed) 24 MB. Somehow there might be problems with the files animart7.aff
and animatart8.aff while unpacking (and the errors are different each time we try correcting it).
So, here are correct files: animart7 and animart8
(thanks to Darwin Baines for reporting this).
Acknowledgements:
Thanks to Joachim Helenklaken
for modeling the kitchen scene
(except the glass dragon which was modeled by Takeo Igarashi,
and the animations which was done by Jonas Lext), and to Jens
Larsson for modeling the robots scene (animation done by
Ulf Assarsson).